Digital Twin Driven Fault Detection in Embedded Control Systems Using Real-Time Sensor Fusion
Abstract
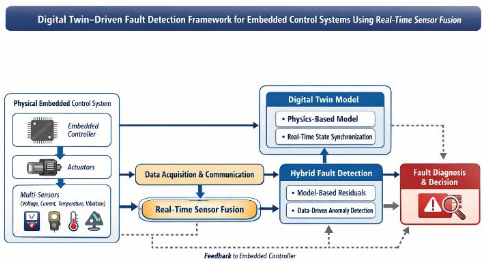
The growing sophistication of embedded control systems in contemporary electronic and cyber-physical systems requires a stable and smart fault detection system to guarantee safety in operations and system reliability. A digital twin-driven fault detection system in embedded control systems is presented in this paper based on real-time sensor fusion. The proposed method combines a high-fidelity digital twin that constantly reflects the dynamic behaviour of the physical system with multi-sensor data taken in real time. The digital twin allows the accurate state estimation and early fault detection of the heterogeneous sensor signals including voltage, current, temperature, and vibration by the fusion of sensor signals in different operating conditions. A hybrid approach to fault detection with a model-based and data-driven approach to anomaly detection is used to differentiate between normal operational deviations and incipient faults. Active synchronisation between the physical system and its digital counterpart means that it is possible to perform adaptive thresholding and robust fault isolation in the presence of sensor noise and environmental uncertainties. The framework runs on a built-in platform, reflecting minimal computational costs and real-time capability. The experimental data verify that the suggested technique is much more effective than the traditional single-sensor and non twin based methods of fault detection and false alarms, as well as fault response time. The introduced digital twin-based architecture is a scalable and intelligent design of health monitoring and fault diagnosis of embedded control systems, which is applicable to power electronics, industrial automation, and smart cyber-physical systems.